Arduino ile Step Motor Kontrolü

Step(Adım ) Motorlar, adından da anlaşılacağı üzere adım adım hareket eden, motorun sargılarından birinin enerjilendirilmesi ile sadece 1 adım hareket eden motorlardır. Adımlarınızın kaç derecelik olacağı motorunuzun tasarımına bağlıdır. Örneğin; 400 adımlık bir step motor 360 derecelik bir tam dönüşünde 400 adım yol alır. Bu durumda motorunuzun bir adım açısı 360/400= 0.9 derece olur. Bu aynı zamanda sizin çözünürlük değerinizdir. Arduino ile Step Motor kontrolü oldukça kolaydır.
Step Motorlarla ilgili ayrıntılı bilgiyi buradan bulabilirsiniz. Ayrıca Arduino IDE’ niz için ilgili kütüphanelere buradan ulaşabilirsiniz.
Step Motorları kullanmak için genelde sürücü devreleri kullanılmaktadır. Step Motorların istenilen yönde ve hızda çalıştırmak istendiğinde sargılarına belli bir sırada darbeler uygulanmalıdır. Bu darbelere göre step motorunuz istenilen sayıda adım atabilir. Günümüzde bu işlemi yapan hazır devreler (kontrolor, sürücü devreler) bulunmaktadır. Sürücü devreleri ile aynı zamanda tork değerinizi de belirlemiş olursunuz.
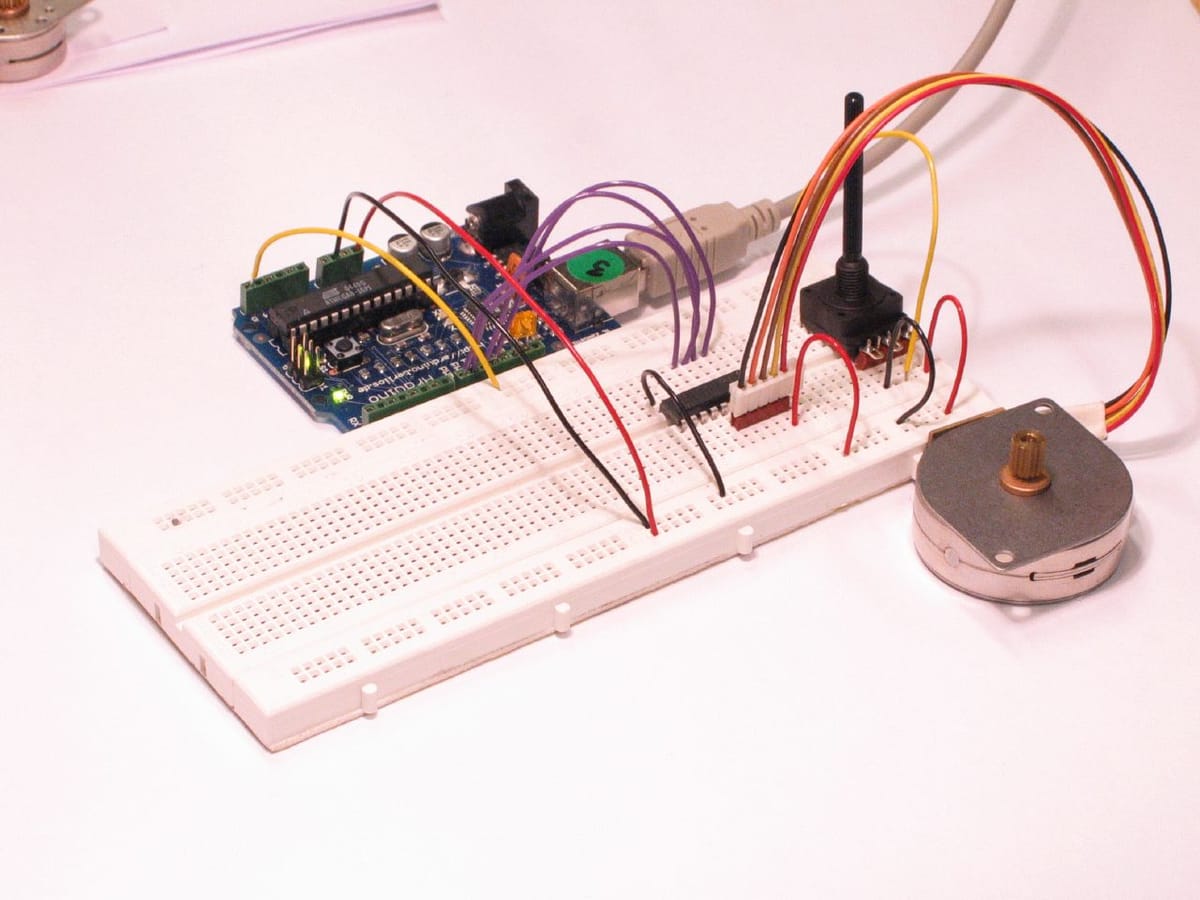
Aşağıdaki örnekte basit bir step motor sürme örneği verilmiştir. Bu örnekte sürücü devresi olarak ULN2003AN kullanılmıştır.
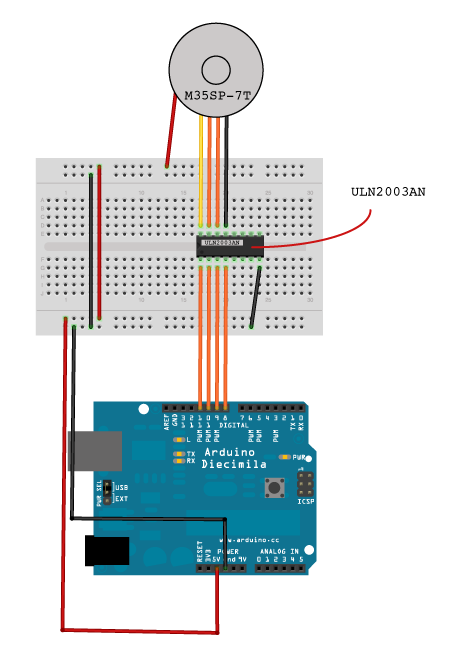
Step motorun 4 tane çıkış pinini sürücü devremiz ile bağlantıladık ve sürücü devremizden de Arduino’ muzun 8, 9, 10, 11 nolu pinlerine bağlantı kurduk. Dolayısıyla step motorun uçlarını sırasıyla HIGH konumuna çekerek motorumuzu hareket ettirebiliriz. Uçlardan sadece birini HIGH(Lojik 1) edebiliriz, bu esnada diğer uçların LOW(Lojik 0) olması gerekir.
Kodlarımız aşağıdaki gibi olmalıdır.
int motorPin1 = 8;
int motorPin2 = 9;
int motorPin3 = 10;
int motorPin4 = 11;
int delayTime = 500;
void setup() {
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
}
void loop() {
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
delay(delayTime);
}
Bu çalışmada step motorun sırasıyla motorPin1, motorPin2, motorPin3, motorPin4 şeklinde tanımladığımız uçlarını HIGH yapıyoruz. Eğer bu sıralamayı motorPin4, motorPin3, motorPin2, motorPin1 şeklinde değiştirirsek motorumuz ters yönde dönmüş olacaktır.